Wracamy do żurawi
Powrót do projektowania żurawi typu offshore
W ostatnim czasie prowadzimy rozmowy z klientami na temat projektowania żurawi - głównie RAM luffing oraz knuckle boom, przeznaczone na różne jednostki pływające. Ze względu na dużą różnorodność typów żurawi oraz ich parametrów technicznych, postanowiliśmy usprawnić projektowanie tego typu urządzeń w celu zmniejszenia ilości czasu wydatkowanego na projekt oraz żeby móc zaproponować klientowi parametry, które są niezbędne do zrealizowania jego celów.
Wykorzystując nasze doświadczenie w tej dziedzinie oraz nowe narzędzia pracy inżynierskiej jakimi są programy obliczeniowe FEM a także w pełni parametryczny system CAD, postanowiliśmy ulepszyć nasze metody i wykorzystać nowatorskie narzędzia do projektowania żurawi. Klienci wymagają urządzeń spełniających przeróżne przepisy takie jak DNV-GL, ABS. Lloyd’s Register. Z tego powodu metody są opracowywane a narzędzia wybierane dla każdych przepisów osobno. Stworzenie uniwersalnego żurawia spełniającego wszystkie przepisy, jest możliwe ale raczej nie można wtedy uzyskać optymalnego rozwiązania ekonomicznego a jest to obecnie podstawowy wymóg klientów. W kilku słowach przedstawimy fragmenty naszych prac.
Projektowanie wysięgnika
Inżynier, który ma na swoim koncie projekt wysięgnika jest świadomy ilości związanych z tym problemów. Z jednej strony musi mieć małą masę i być tani w produkcji. Z drugiej strony wysięgnik zmieniając położenie w czasie pracy, narażony jest na duże spektrum obciążeń ze względu na charakter i wielkości tych obciążeń. Dodatkowym utrudnieniem jest jego skomplikowany kształt i zmienna geometria. Wymaga to przeliczenia wysięgnika w wielu położeniach - przeliczenie w jednym - które naszym zdaniem będzie położeniem wymiarującym, może być bardzo ryzykownym posunięciem i jest możliwe tylko przy posiadaniu bardzo dużego doświadczenia.
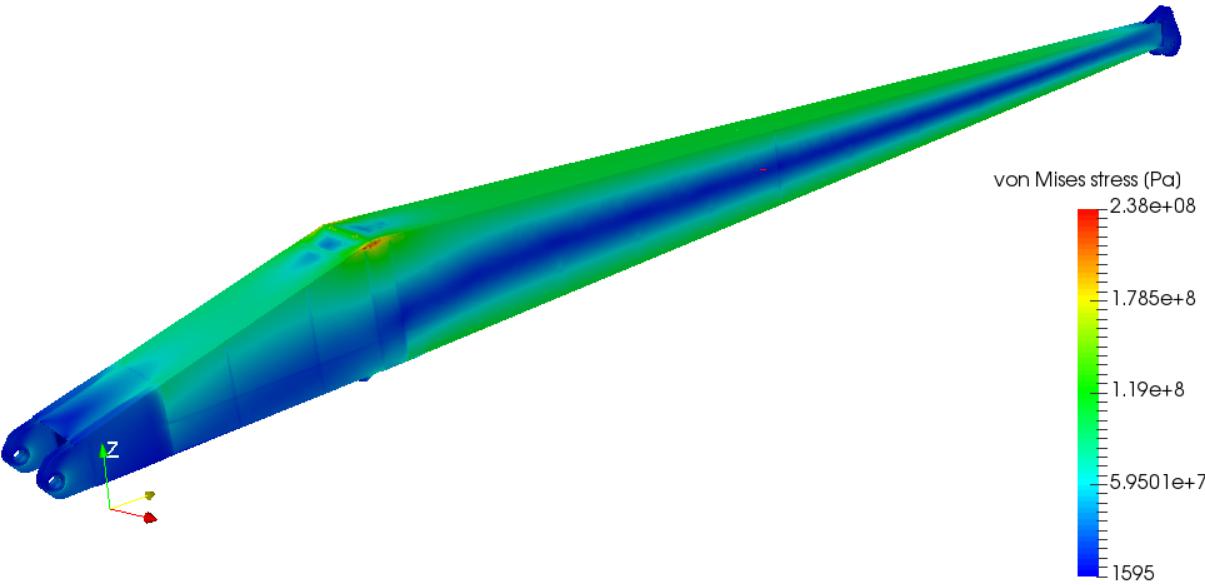
Naszym założeniem była chęć poznania, jak zmieniają się naprężenia w czasie zmiany wysięgu i na tej podstawie przeprowadzenie optymalizacji kształtu wysięgnika a na koniec wykonanie ostateczny model FEM, w celu ostatecznego potwierdzenia naszych założeń. W odpowiedzialnych elementach stosujemy przynajmniej dwie metody obliczeniowe, używając programu FEM do obliczenia elementu - dzięki czemu zyskujemy pewność, że nasze założenia były słuszne.
Poniżej wykres naprężeń w wysiegnik w funkcji odległości od początku wysięgnika dla różnych położeń wysięgnika.
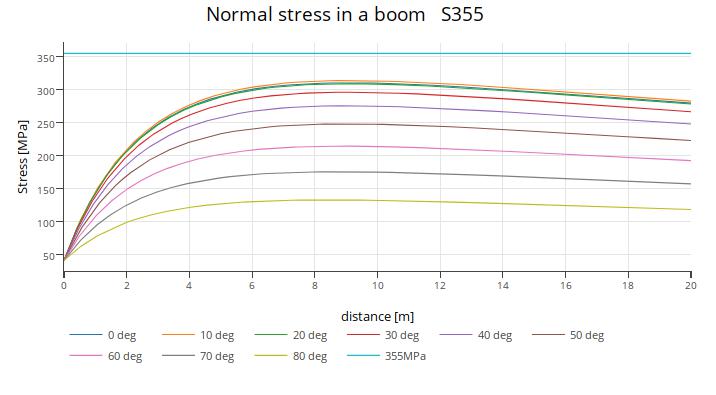
Przy pomocy tego algorytmu obliczeniowego możemy na początku projektowania w szybki sposób wstępnie dobrać optymalny kształt wysięgnika, który później potwierdzimy w rezultatach otrzymanych z modelu FEM.

W pełni parametryczny program CAD w bardzo łatwy sposób pozwala na modyfikację wysięgnika i szybkie przygotowanie ostatecznego rozwiązania wysięgnika do dalszych obliczeń.
Przy okazji prac nad żurawiami testujemy programy FEM aby szybko przekształcić model CAD w model FEM i w łatwy sposób przygotować obciążenia do przeliczenia wysięgnika w wielu położeniach. Prace ciągle trwają, rozwijamy nasze modele wprowadzając następne zmienne - jak na przykład zmienny współczynnik dynamiczny zależny od sztywności żurawia.
Dobór cylindra zwodzenia
Podobnie jak w przypadku wysięgnika również występuje zmienność siły działającej na cylinder w czasie podnoszenia wysięgnika . Poniżej przykładowy wykres przebiegu siły w funkcji pochylenia wysięgnika. Uwzględniono wszystkie czynniki wpływające na przebieg siły, takie jak na przykład charakterystyka żurawia, działanie wiatru w czasie podnoszenia wysięgnika (zmienia się powierzchnia i kąt działania wiatru).
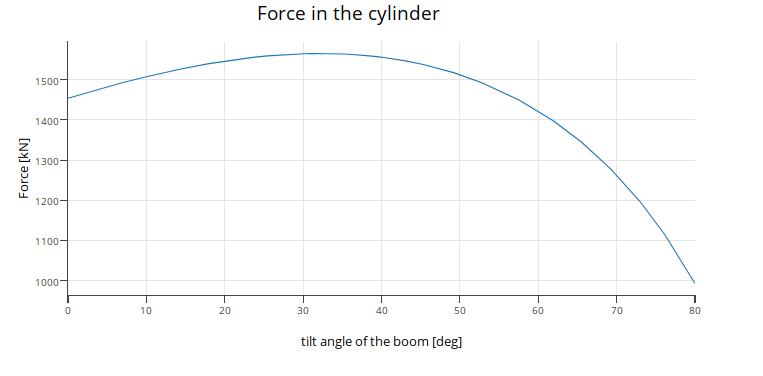
Jak widać w tym przypadku maksymalna siła w cylindrze nie występuje w początkowej fazie ruchu ale przy kącie ok. 35 deg.
Dodatkowo cylindry są ściskane i należy je sprawdzić na wyboczenie - zgodnie z wymaganiami przepisów. W czasie wysuwu cylindra zwiększa się jego długość oraz zmniejsza się jego odporność na wyboczenie. Dodatkowo mając zmienną wartość siły analiza bez dokładnych obliczeń jest dużo trudniejsza a źle przyjęte uproszczenia mogą przewymiarować cylinder a w gorszym przypadku - nawet dobrać mniejszy niż wymagają tego przepisy.
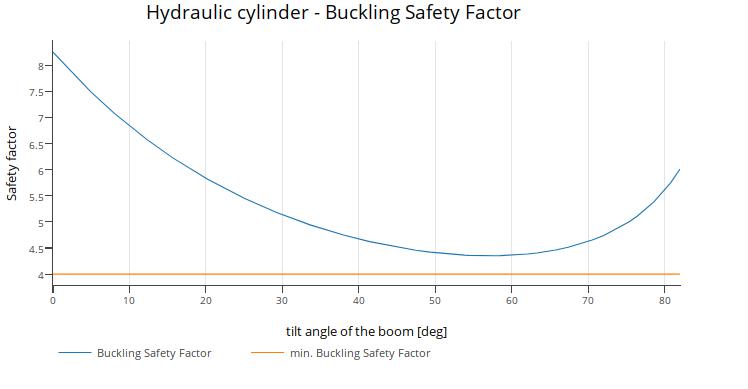
Na przedstawionym wykresie współczynnika bezpieczeństwa na wyboczenie cylindra (patrz przepisy DNV-GL) widać, że obecny cylinder spełnia wymagania przepisów a najmniejszy współczynnik wynosi ok. 4,5 przy kącie pochylenia wysięgnika równym 55 deg.
Reasumując, przedstawione wyniki pokazują, że trudno w przypadku żurawi w sposób pewny określić, które położenie będzie najbardziej obciążało dany element żurawia. Niezbędna jest analiza wielu położeń pracy żurawia a bez przygotowania wcześniej prostych narzędzi - będzie to bardzo czasochłonne a przyjęcie pewnych uproszczeń może być obarczone dużym błędem. Zmiana pewnych danych środowiskowych lub charakterystyki żurawia może całkowicie zmienić obciążenia i przyjęte wcześniej założenia mogą okazać się błędne.